

本文基于IEEE Std 802.3-2022 PCS 章节,介绍几种66b同步方法,处理位宽包括64bit数据到32bit数据,并给出一些优化方案。
整个简化流程可以表示为:
64bit输入数据->增加同步头->转换成64bit位宽数据-----> PMA tx ----->PMA rx ---->66b同步->去同步头->64bit数据
在上述流程中,没有包括加解扰,也没有包括FEC编解码及帧同步,这些内容后续再补充。PMA属于模拟部分,也不包括。
1.整体框架
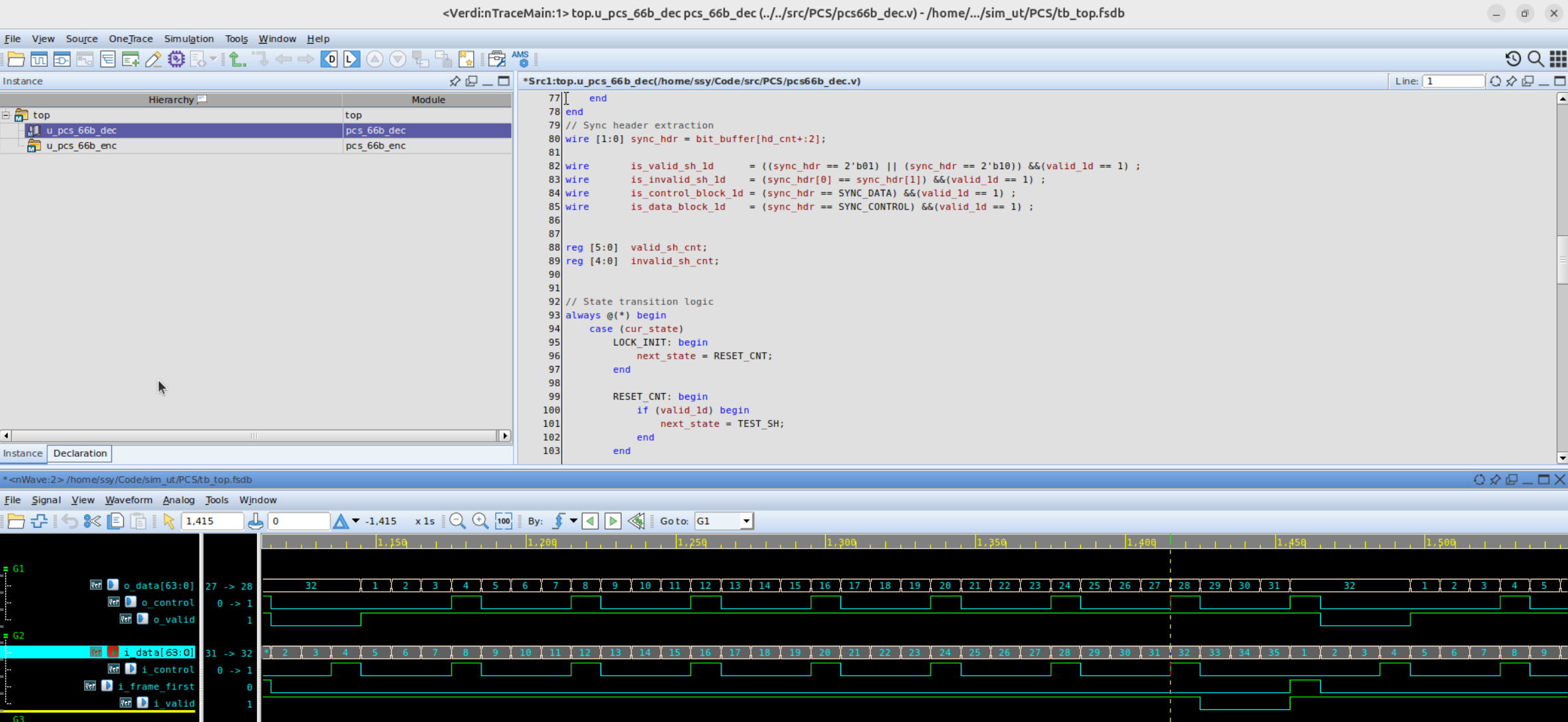
假设发送模块输入信号分别为 i_control, i_data, i_frame_first, i_valid。这三个信号分别表示当前数据包含控制符(影响同步头),输入数据,起始帧指示(32拍64bit信号作为一帧),数据有效指示信号。模块输出数据为o_data,o_valid,此时输出数据为纯数据流。
解释一下为什么需要i_frame_first 这个信号,由于32拍数据会插入64bit同步头,说明下一拍输入数据valid数据要保持低电平并且输出缓存下来的第33个64bit数据,所以是33拍数据一个循环。如果没有这个i_frame_first 指示信号根据33拍的周期重复校准,一旦内部计数器有扰动就再也无法和输入数据对齐了。这个问题我们可以在后续代码中查看。
首先来构造一下激励:
module top();
reg clk = 0;
reg rst_n = 0;
always #5 clk = ~clk;
reg [6:0] cnt33 = 'd0;
reg data_vld;
reg first_dat;
always @(posedge clk or negedge rst_n) begin
if(rst_n == 1'd0)begin
cnt33 <= 'd0;
data_vld <= 'd0;
first_dat <= 'd1;
end
else if(cnt33 == 'd32)begin
cnt33 <= 'd0;
data_vld <= 'd0;
first_dat <= 'd0;
end
else begin
data_vld <= 'd1;
cnt33 <= cnt33 + 'd1;
first_dat <= cnt33 == 'd0;
end
end
initial begin
#50;
rst_n = 1;
#5000;
$finish;
end
initial begin
$fsdbDumpfile("top.fsdb");
$fsdbDumpvars(0,top);
$fsdbDumpMDA();
end
endmodule
/*
# ------------------------------------
# File: /home/ssy/Code/hdl/MAC/pcs_66b_enc.v
# Project: /home/ssy/Code/hdl/MAC
# Created Date: Wednesday, December 17th 2025, 11:33:00 pm
# Author: Shirainbown
# -----
# Module: pcs_66b_enc.v
# -----
# Description:
# -----
# Copyright (c) 2025 Non Inc.
# ------------------------------------
*/
module pcs_66b_enc (
input clk,
input rst_n,
// Input interface (frame-based, 64-bit)
input [63:0] i_data,
input i_control,
input i_frame_first,
input i_valid,
// Output interface (pure 64-bit data stream)
output reg [63:0] o_data,
output reg o_valid
);
// ==============================
// 1. 64B/66B Encoder
// ==============================
localparam [1:0] SYNC_DATA = 2'b01;
localparam [1:0] SYNC_CONTROL = 2'b10;
wire [65:0] encoded_66b; // [65:64] = sync header
reg enc_valid;
assign encoded_66b = i_control ? { i_data, SYNC_CONTROL}: { i_data, SYNC_DATA};
reg [6:0] frame_cnt; // 0 to 31
reg [63:0] data_dly;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
frame_cnt <= 7'd0;
data_dly <= 64'd0;
end
else begin
if (i_valid) begin
frame_cnt <= i_frame_first == 1'd1 ? 7'd1 : frame_cnt + 1;
data_dly <= i_data;
end else begin
frame_cnt <= frame_cnt>= 7'd32 ? 7'd0 : frame_cnt;
data_dly <= data_dly;
end
end
end
wire [129:0] tmp_data;
assign tmp_data = {encoded_66b, data_dly } >> (7'd64 - (frame_cnt * 2) );
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
o_data <= 64'd0;
o_valid <= 1'b0;
end else begin
if (i_valid == 1'd1 ) begin
o_data <= tmp_data[0+:64] ;
o_valid <= 1'b1;
end else begin
o_valid <= frame_cnt == 7'd32 ? 1'd1:1'b0;
o_data <= frame_cnt == 7'd32 ? data_dly :o_data;
end
end
end
endmodule
module pcs_66b_dec (
input clk,
input rst_n,
// Input: pure 64-bit data stream (from descrambler)
input [63:0] i_data,
input i_valid, // usually always 1 in continuous mode
// Output: reconstructed frame interface
output reg [6:0] slip_cnt,
output reg [63:0] o_data,
output reg o_control,
output reg o_valid
);
localparam [1:0] SYNC_DATA = 2'b01;
localparam [1:0] SYNC_CONTROL = 2'b10;
localparam LOCK_INIT = 3'd0;
localparam RESET_CNT = 3'd1;
localparam TEST_SH = 3'd2;
localparam GOOD = 3'd3;
localparam SLIP = 3'd4;
wire [129:0] bit_buffer; //64+66
reg [63:0] i_data_1d;
reg [63:0] i_data_2d;
reg [2:0] cur_state;
reg [2:0] next_state;
assign bit_buffer = {i_data[1:0],i_data_1d,i_data_2d};
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
i_data_1d <= 64'd0;
i_data_2d <= 64'd0;
end
else begin
i_data_1d <= i_valid == 1'd1 ? i_data: i_data_1d;
i_data_2d <= i_valid == 1'd1 ? i_data_1d: i_data_2d;
end
end
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
cur_state <= LOCK_INIT;
end
else begin
cur_state <= next_state;
end
end
reg locked ;
reg [6:0] hd_cnt ;
reg valid_1d;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
valid_1d <= 1'b0;
end
else begin
valid_1d <= i_valid;
end
end
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
hd_cnt <= 7'b0;
end
else if(i_valid )begin
hd_cnt <= (hd_cnt + 7'd2 - (cur_state == SLIP ) ) >= 7'd66 ? hd_cnt - 7'd64 : hd_cnt + 7'd2 - (cur_state == SLIP);
end
end
// Sync header extraction
wire [1:0] sync_hdr = bit_buffer[hd_cnt+:2];
wire is_valid_sh_1d = ((sync_hdr == 2'b01) || (sync_hdr == 2'b10)) &&(valid_1d == 1) ;
wire is_invalid_sh_1d = (sync_hdr[0] == sync_hdr[1]) &&(valid_1d == 1) ;
wire is_control_block_1d = (sync_hdr == SYNC_CONTROL) &&(valid_1d == 1) ;
reg [5:0] valid_sh_cnt;
reg [4:0] invalid_sh_cnt;
// State transition logic
always @(*) begin
case (cur_state)
LOCK_INIT: begin
next_state = RESET_CNT;
end
RESET_CNT: begin
if (valid_1d) begin
next_state = TEST_SH;
end
end
TEST_SH: begin
if(is_valid_sh_1d )begin
if(valid_sh_cnt >= 6'd63 )begin
next_state = invalid_sh_cnt == 'd0 ? GOOD : (locked == 1'd1) ? RESET_CNT : TEST_SH;
end else begin
next_state = TEST_SH;
end
end
else if (is_invalid_sh_1d) begin
if(invalid_sh_cnt >= 5'd15)begin
next_state = SLIP;
end
else begin
next_state = (locked == 1'd1) ? TEST_SH : SLIP;
end
end
end
GOOD: begin
next_state = RESET_CNT;
end
SLIP: begin
next_state = RESET_CNT;
end
default: next_state = LOCK_INIT;
endcase
end
// Counters and lock flag
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
valid_sh_cnt <= 6'd0;
invalid_sh_cnt <= 5'd0;
locked <= 1'b0;
slip_cnt <= 'd0;
end else begin
case (cur_state)
LOCK_INIT: begin
valid_sh_cnt <= 6'd0;
invalid_sh_cnt <= 5'd0;
locked <= 1'b0;
slip_cnt <= 'd0;
end
RESET_CNT: begin
valid_sh_cnt <= 6'd0;
invalid_sh_cnt <= 5'd0;
end
TEST_SH: begin
if (is_valid_sh_1d) begin
valid_sh_cnt <= valid_sh_cnt + 1;
end else if(is_invalid_sh_1d) begin
invalid_sh_cnt <= invalid_sh_cnt + 1;
end
end
GOOD: begin
locked <= 1'b1;
end
SLIP: begin
slip_cnt <= slip_cnt +1;
locked <= 1'd0;
end
endcase
end
end
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
o_data <= 64'd0;
o_control <= 1'b0;
o_valid <= 1'b0;
end else begin
if (locked == 1'd1 && valid_1d == 1'd1 && hd_cnt <= 7'd62 ) begin
o_data <= bit_buffer[hd_cnt+2+:64];
o_control <= is_control_block_1d;
o_valid <= 1'b1;
end else begin
o_valid <= 1'b0;
o_control <= 1'd0;
// Keep other outputs stable or zero
end
end
end
endmodule// testbench
module top();
reg clk = 0;
reg rst_n = 0;
always #5 clk = ~clk;
reg [6:0] cnt33 = 'd0;
reg data_vld;
reg first_dat;
always @(posedge clk or negedge rst_n) begin
if(rst_n == 1'd0)begin
cnt33 <= 'd0;
end
else if(cnt33 <= 34)begin
cnt33 <=cnt33 +1;
end
else begin
cnt33 <=1;
end
end
initial begin
rst_n = 0;
#50;
rst_n = 1;
#5000;
$finish;
end
wire [63:0] data;
wire vld;
pcs_66b_enc u_pcs_66b_enc(
.clk (clk ),
.rst_n (rst_n ),
.i_data (cnt33 ),
.i_control (cnt33%4==0 ),
.i_frame_first (cnt33 == 1 ),
.i_valid (cnt33<=32 ),
.o_data ( data ),
.o_valid (vld )
);
pcs_66b_dec u_pcs_66b_dec(
.clk (clk ),
.rst_n (rst_n ),
.i_data (data ),
.i_valid (vld ),
.o_control ( ),
.o_data ( ),
.o_valid ( )
);
initial begin
$fsdbDumpfile("tb_top.fsdb");
$fsdbDumpvars(0,top);
$fsdbDumpMDA();
end
endmodule
Verilog设计:简易的PCS模块66b同步设计
https://songshiyu.cn/archives/verilogshe-ji-jian-hua-de-zheng-tong-bu-she-ji
评论